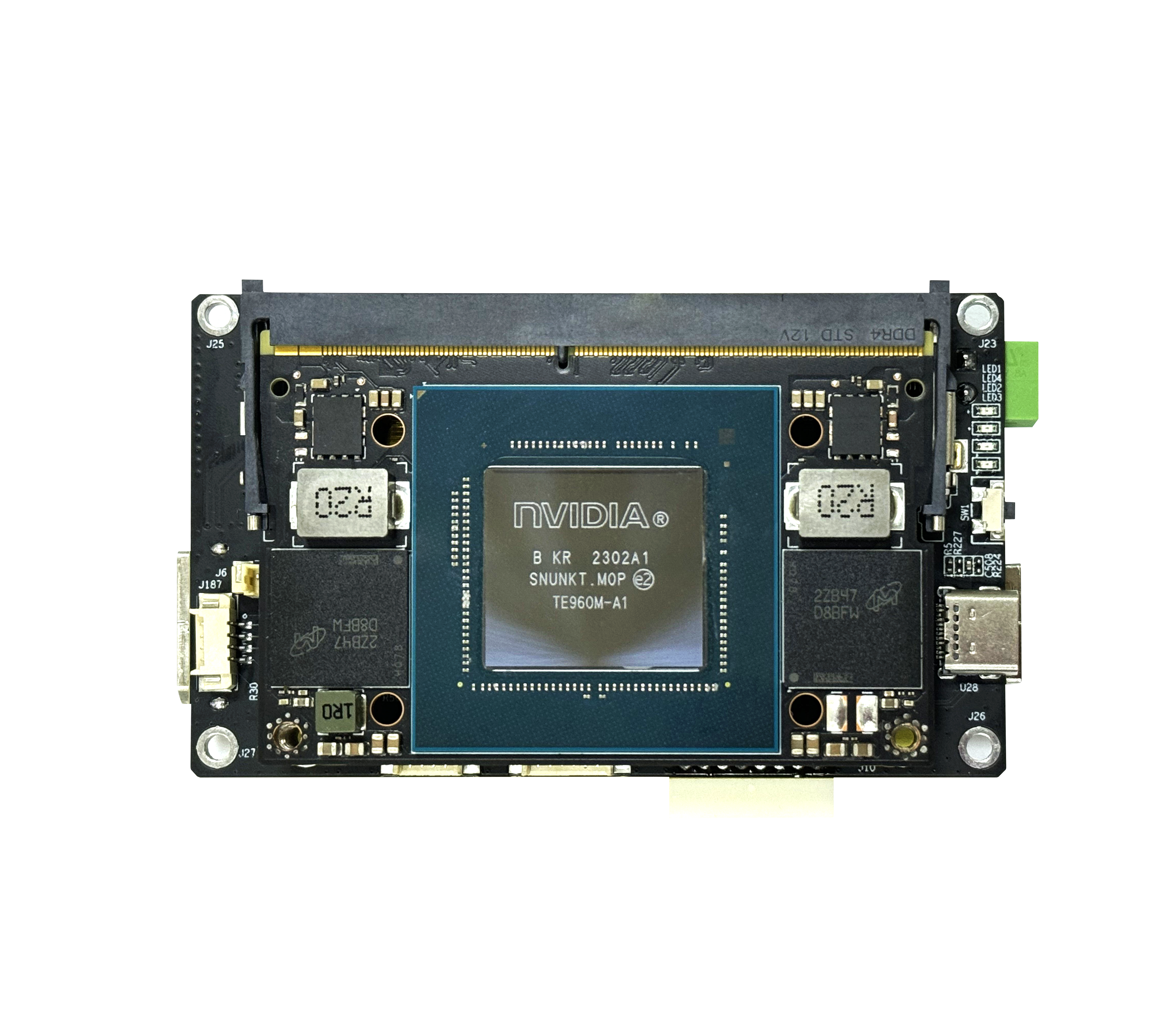
處理器 采用英偉達(dá)Orin nano/Orin nx芯片,具有強(qiáng)大的計(jì)算能力和高效的能耗管理。
內(nèi)存和存儲 配備大容量的內(nèi)存和高速存儲,以滿足無人機(jī)、機(jī)器人和智能車等應(yīng)用對數(shù)據(jù)處理和存儲的需求。
接口豐富 擁有多個(gè)USB、以太網(wǎng)、DP等接口,方便與各種外部設(shè)備進(jìn)行連接和通信。
圖形處理能力 具備出色的圖形處理能力,可支持高清顯示屏和圖形界面的開發(fā)。
|
Feature |
Jetson Xavier NX |
Jetson Orin Nano4GB |
Jetson Orin |
Jetson Orin 8GB |
Jetson Orin NX 16GB |
||
|
|
|||||||
|
|
|
20 TOPS |
40 TOPS |
70 TOPS |
100 TOPS |
||
|
|
|
Ampere,512CUDA Cores,16 Tensor Cores 625 MHz |
Ampere,1024 |
Ampere,1024 |
Ampere,1024 |
||
|
CPU |
6X Carmel,2.0 GHz |
6X A78,1.5 GHz |
6X A78,2.0 GHz |
8X A78,2.0 |
|||
|
Memory |
8 GB/16 GB,60 GB/s |
4GB,34 GB/s |
8GB,68 GB/s |
8GB,102 GB/s |
16GB,102GB/s |
||
|
DLA |
2x DLAv1 |
|
1X DLA v2 |
2X DLA v2 |
|||
|
Vision ACC |
PVAv1 |
|
PVA v2 |
||||
|
Storage |
16GB eMMC |
|
|||||
|
|
|
||||||
|
|
H.265 |
VP9 |
H.265 |
AV1 |
AV1 |
H.264 |
|
|
Video Encode |
H.265 |
H.264 |
No NVENC.Video Encode |
H.265 |
AV1 |
||
|
|
|||||||
|
USB 2.0 |
3 |
||||||
|
USB 3.2 |
1x USB 3.2 |
3x USB 3.2 |
|||||
|
|
x4 Gen4+x1 Gen3 |
|
|
||||
|
Display |
2x4K60 |
1 multi-mode[4K30,2x1080p60],DP1.2+MST,HDMI1.4,eDP1.4 |
1 multi-mode (8K30,2x4K60)), |
||||
|
Camera |
|
|
|||||
|
|
2 |
||||||
|
|
|
|
|||||
|
|
1x GbE |
||||||
|
I2C |
4 |
||||||
|
UART |
3 |
||||||
|
SPI |
2 |
||||||
|
CAN |
1 |
||||||
|
Fan |
|
||||||
|
|
|||||||
|
|
|
|
|||||
|
|
|
||||||
|
Power |
|
|
|
|
|
||
|
Input Voltage |
5V |
5V-20V |
|||||
操作系統(tǒng) 支持Linux等操作系統(tǒng),為開發(fā)者提供了豐富的開發(fā)資源和工具。
深度學(xué)習(xí)框架 兼容多種深度學(xué)習(xí)框架,如TensorFlow、PyTorch等,方便進(jìn)行人工智能算法的開發(fā)和部署。
無人機(jī) 可用于無人機(jī)的飛行控制、圖像處理、目標(biāo)識別等任務(wù),提高無人機(jī)的智能化水平和自主飛行能力。
機(jī)器人 適用于機(jī)器人的導(dǎo)航、感知、決策等功能,使機(jī)器人能夠更加靈活地應(yīng)對復(fù)雜的環(huán)境和任務(wù)。
智能車 能夠?yàn)橹悄苘囂峁?qiáng)大的計(jì)算平臺,支持自動(dòng)駕駛、環(huán)境感知、車聯(lián)網(wǎng)等應(yīng)用,提升智能車的安全性和舒適性。